スタート地点と目的が異なるもう一つの誘導方式
『業務自動化』において、現場業務の自動化は不可欠です。なかでも、搬送業務の自動化は、現場負荷の軽減と生産性向上を支える重要な領域。その役割を担うのが、AMR(自律走行搬送ロボット)・AGV(無人搬送車)です。
UWB高精度位置測位を用い、個々の車両の制御だけを目的とせず、現場の実現性を考えたフリートコントロールを可能とし、かつヒト・モノも含めた統合管理・制御の実現をコンセプトにして開発されたのが LANDMANTMです


手を入れられるAMR・AGV
AMR・AGVの制御と機能に業務を合わせる考え方では、『業務自動化』の実現は困難な道のりになります。
業務に合わせてカスタマイズ可能なAMR・AGVのニーズは高まっており、それに応えるのがLANDMAN AMR・AGVシリーズです。
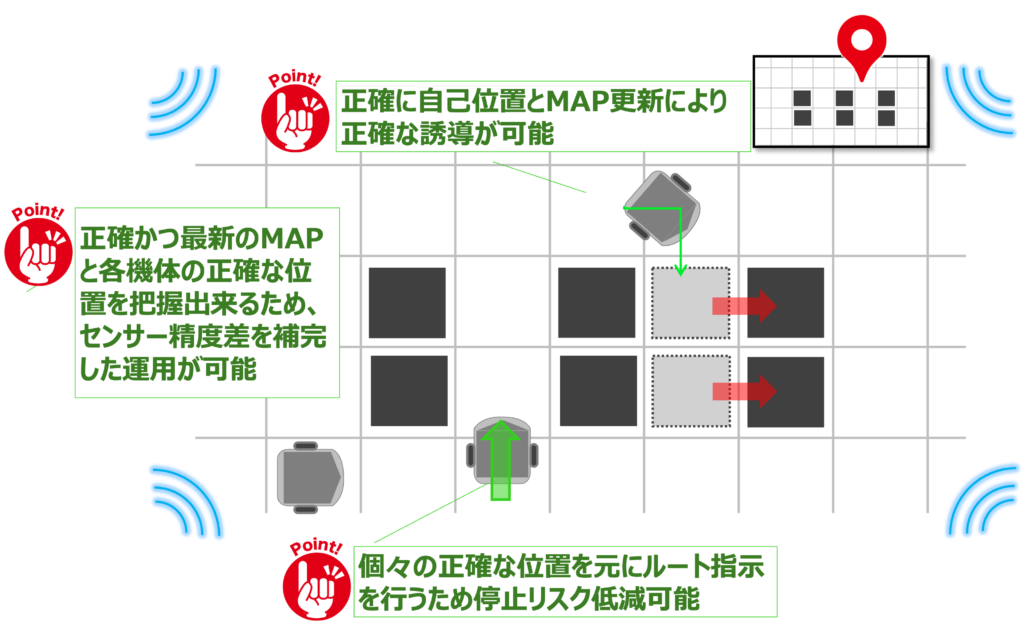
AMR・AGVを停めない 〜+UWB Hybrid誘導方式〜
従来の誘導方式では、位置ズレや誘導ロストによる搬送停止が大きな課題でした。
UWBによるリアルタイムな自己位置補正により、誘導誤差の蓄積を根本から抑制。さらに、動的な経路再設定と連続補正制御を組み合わせることで、搬送中の停止リスクを構造的に回避します。このハイブリッドアプローチにより、AMR・AGVの安定稼働率が飛躍的に向上。「動き続ける搬送」が、現場の生産性と信頼性を力強く支えます。
ー2次元バーコード誘導 メリットを残し、 デメリットを消す +UWB Hybrid誘導ー
メリット
• 経路の明確化
• 導入コストが低い
• 汎用性
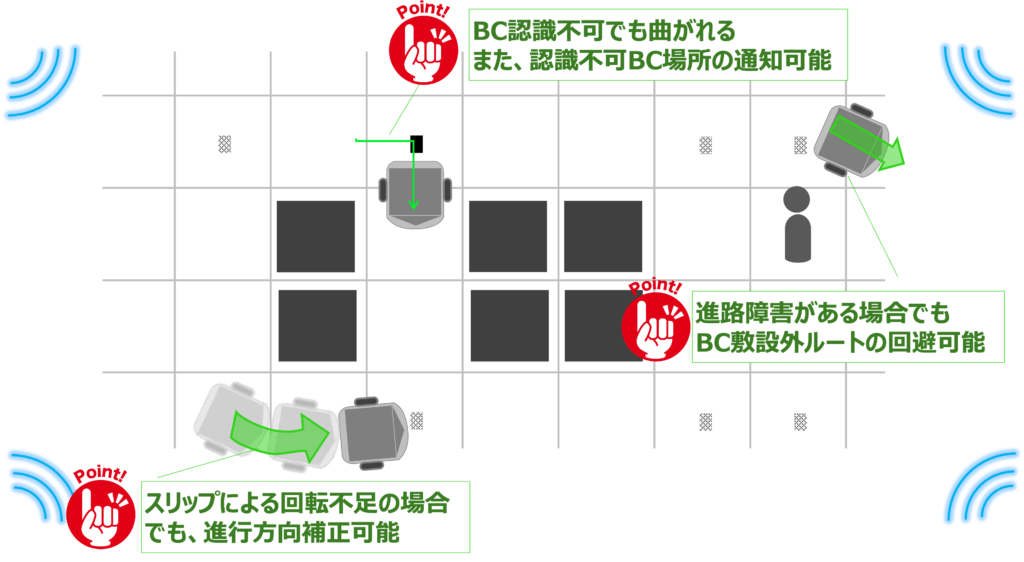
• 正確な位置情報
デメリット
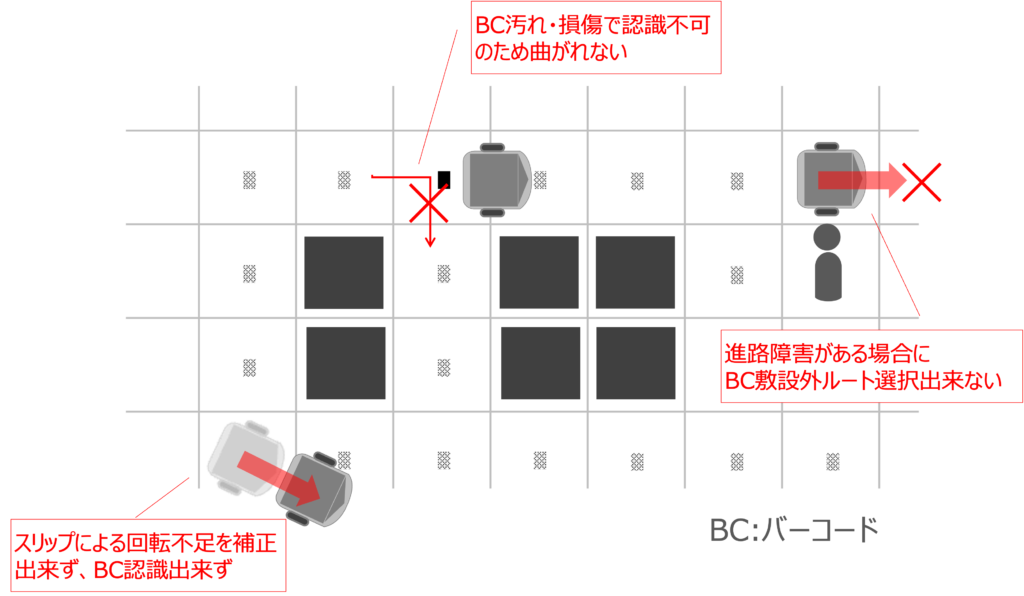
•バーコードの汚れや損傷
•車体の傾きやスリップによる進路逸脱
•柔軟性の欠如
•定期メンテナンスが必要
2次元バーコード誘導のみ
+UWB誘導 ハイブリッド方式
ーSLAM誘導 メリットを残し、 デメリットを消す ”+UWB Hybrid誘導”ー
メリット
• 自己位置推定の精度向上
• 柔軟な経路設定
• 汎用性レイアウト変更に対応
• インフラコストの削減
デメリット
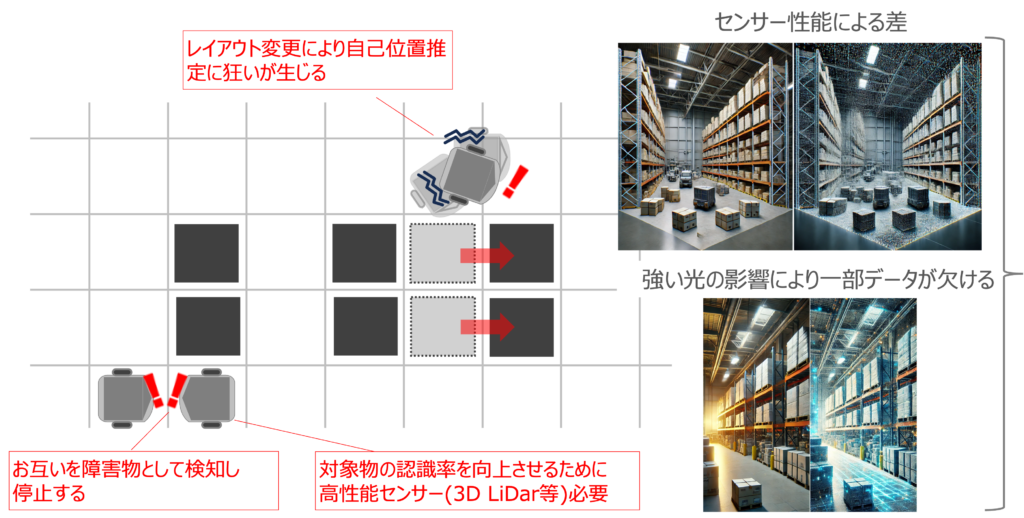
•位置推定エラーのリスク
•高コストと複雑さ
• 通信トラブルの影響
• メンテナンス頻度が高い
SLAM誘導のみ
+UWB誘導 ハイブリッド方式
混在するAMR・AGVを統合制御。現場オペレーションを革新する
AMR・AGVの普及が進む中、搬送重量や搬送方式、利用用途に応じて各社から多様な機種が投入されています。そのため、今後現場には複数メーカー・複数機種が混在する状況が一般化していくことが想定されます。
KINEXON Fleet Managerは、こうした多様な移動ロボットをメーカーや機種を問わず一元管理・制御できる革新的なプラットフォームです。統合的なフリートコントロールにより、現場の搬送効率向上と柔軟な運用を実現します。
マルチベンダー型フリート運用の課題
❗ 多様な車両要件
車両の種類が異なることで管理が複雑化する
❗ 独自仕様のシステム
互換性のないソフトウェアが協調を妨げる
❗ ベンダーロックイン
統合コストと柔軟性の欠如により特定ベンダーへの依存が生じる
❗ 非効率なルーティング
ベンダー固有のプラットフォームが効率を低下させる
❗ データの分断
中央集約されていないデータが意思決定を妨げる
主要な戦略
✅ 標準化の採用
スムーズな統合のために VDA5050* を導入する
✅ ロックインの回避
柔軟性のために独立したフリート管理を活用する
✅ 制御の一元化
スケーラビリティと効率性を向上させる
✅ シームレスな統合
自律運用のために WMS、MES、ERP と接続する
✅ AIの活用
予測分析と意思決定のためにAIを活用する
✅ BPの採用(ベストプラクティス)
Continental のような業界リーダーから学ぶ